Alejandro10inv
Colombia

Design an Electro-Mechanical Arm (EMA)
In this contest, you are asked to design an “Electro-Mechanical Arm” (EMA) that mechanically mounts directly to Astrobee. The EMA will be electrically-powered and driven by a (separately-designed) set of electronics hardware and control software. This challenge is focused on the mechanical design of a robotic arm controlled by a separately designed piece of hardware.
How it works:
Initially, the EMA will be stowed in Astrobee’s payload bay. When powered and controlled by a separately-designed motion control system, the EMA shall be able to accomplish the following high-level actions:
1) unpacking from a stowed configuration in Astobee’s compact payload bay and attaching to an International Space Station (ISS) Handrail,
2) orienting Astrobee by rotating in two directions (“pan” and “tilt”), and 3) detaching from the Handrail and (re-)stowing in the payload bay.
Click on the links below to see detailed design instructions, constraints and solution templates for this problem.
Challenge rules:
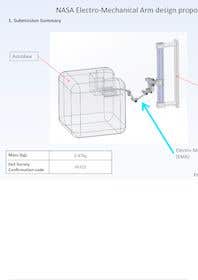
The prize will be awarded for the lowest mass, technically feasible solution, submitted by the contest deadline.
No working prototype is required for submission, but the design must be sufficiently detailed to allow experts to assess the feasibility of your design (i.e., comply with all requirements) and the credibility of your mass estimate.
Only complete submission packages will be evaluated.
UPDATE: See "Clarification of Figure 7 and Payload Volume.pdf" attached.
“Marco Saul C. developed a very creative design for an electro-mechanical robotic arm. This was a contest and this design was selected from 40 entries as the most feasible and least mass design. Marco Saul C. provided a thorough design submission and a very innovative design. ”
![]() nasacoeci, United States.
nasacoeci, United States.











あなたのコンテストを投稿 速くて簡単
たくさんのエントリーを集めましょう 世界中から
ベストエントリーをアワード ファイルをダウンロード - 簡単!