

あなたはをフォローしました
ユーザーのフォローエラー。
このユーザーはフォローを許可していません。
このユーザーをすでにフォローしています。
あなたのメンバーシッププランは、0 個のフォローのみ許可します。アップグレードは、 こちら。
のフォローを解除しました
ユーザーのフォロー解除エラー。
あなたはを推薦しました
ユーザーの推薦エラー。
何か問題が発生しました。ページを更新してもう一度お試しください。

仕事についてAhmed O.に連絡する
ログインしてチャットで詳細を相談しましょう、
ポートフォリオ
ポートフォリオ
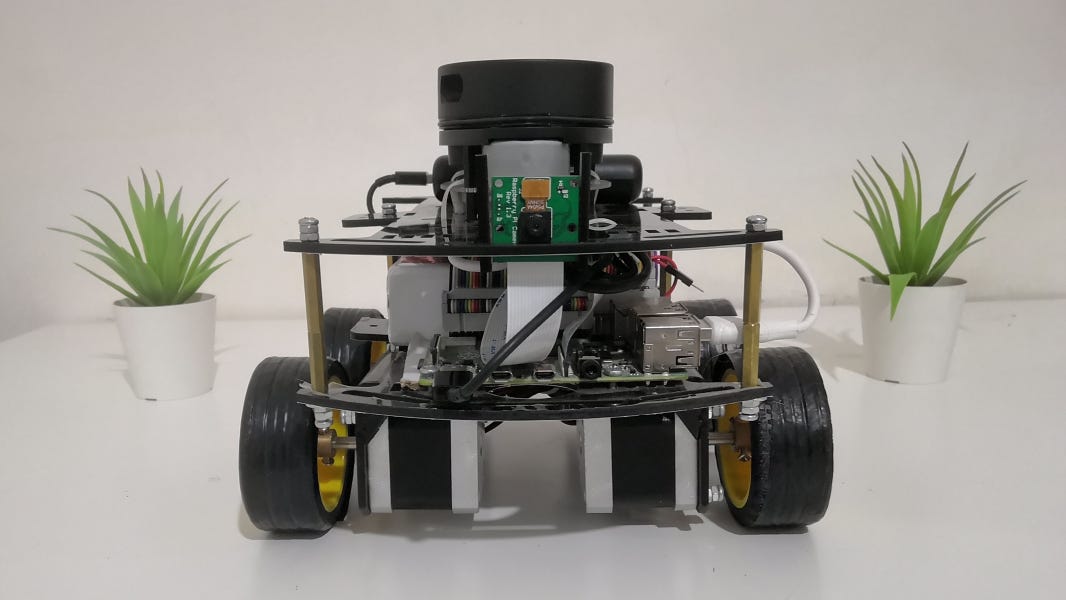

AIO_Robot platform V0.1

AIO_Robot platform V0.1
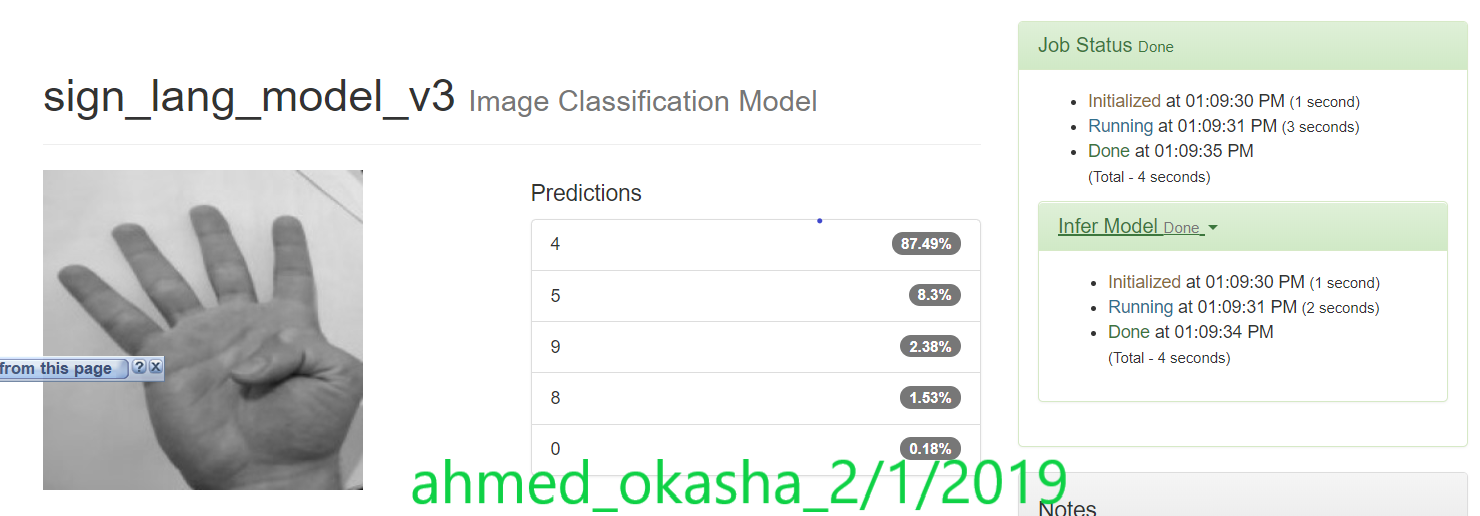

CNN Sign-language Classifier
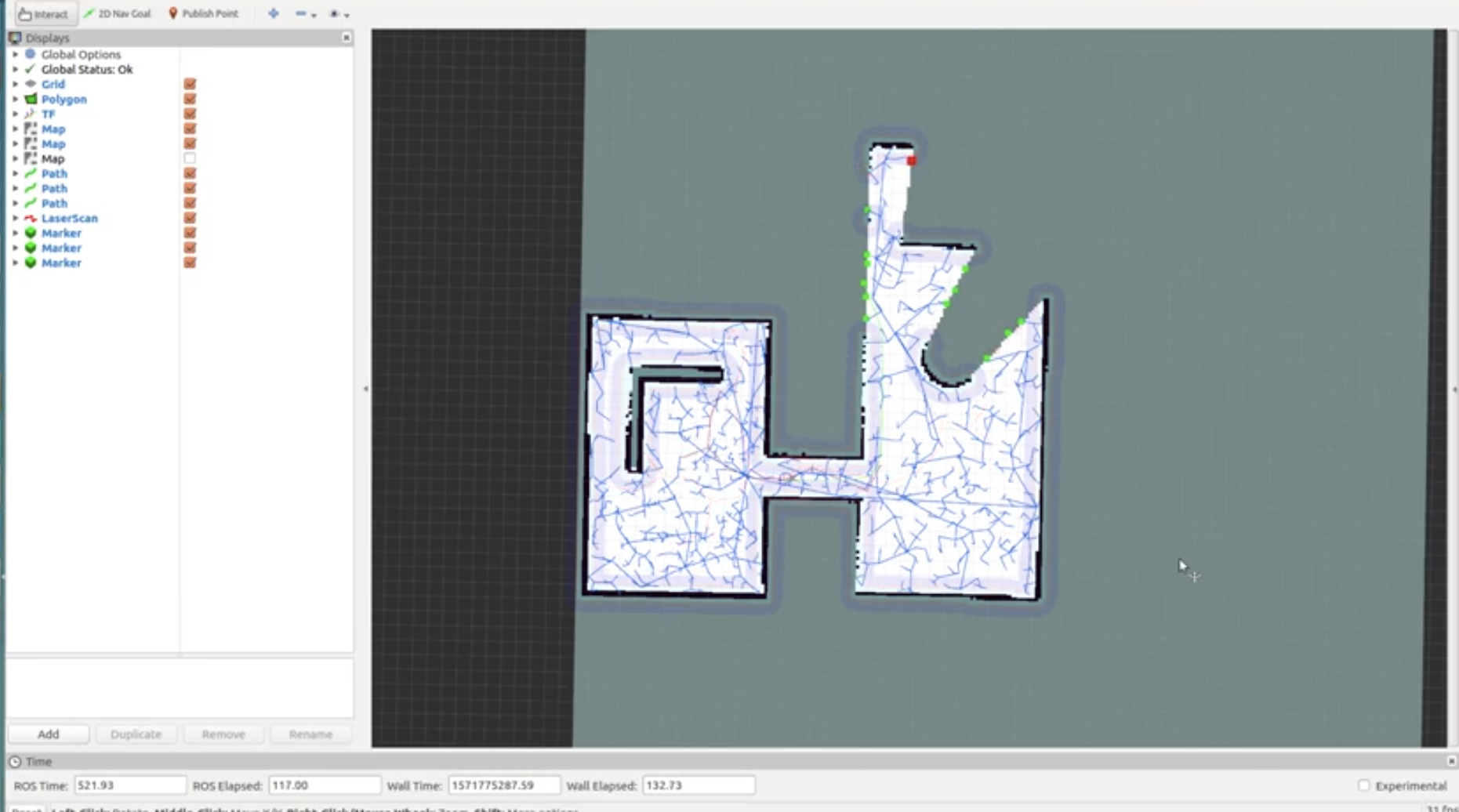

Autonomous Exploration & Mapping Project

Autonomous Exploration & Mapping Project
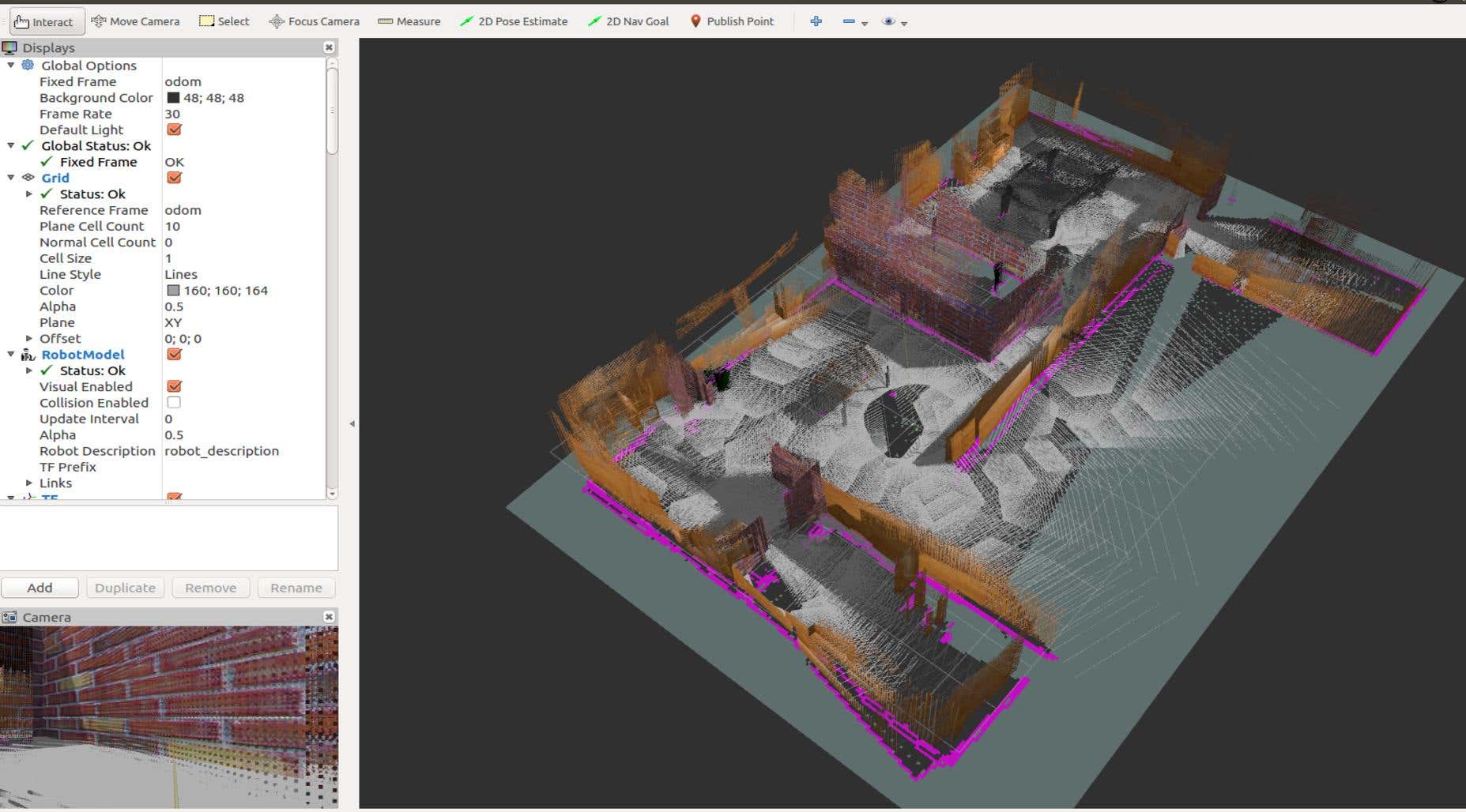

Simultaneous Localization And Mapping Project (SLAM)

Simultaneous Localization And Mapping Project (SLAM)

Gazebo Robot Model

MinSweepers 2019 Robot
AIO_Robot platform V0.1
AIO_Robot platform V0.1
CNN Sign-language Classifier
Autonomous Exploration & Mapping Project
Autonomous Exploration & Mapping Project
Simultaneous Localization And Mapping Project (SLAM)
Simultaneous Localization And Mapping Project (SLAM)
Gazebo Robot Model
MinSweepers 2019 Robot
レビュー
変更を保存しました
1 - 5 / 13 レビュー表示中
$85.00 USD
Raspberry Pi
A

•
$200.00 USD
Python
Microcontroller
Machine Learning (ML)
Robotics
+1 もっと

•
$40.00 USD
Python
Tensorflow
•
$60.00 USD
Python

•
€100.00 EUR
Python
Microcontroller
Machine Learning (ML)
Robotics
+1 もっと
•
経験
Robotics, AI Engineer
10月 2020 - 現在
● Designing and implementing software using C++ and Python in Linux
● Developing C++, Python ROS/ROS2 packages and DL models for vision tasks
● Analyzing data and optimizing algorithms using Python
● Designing software architecture for robotic systems
● Testing code in simulated environments
● Developing software for navigation, control and sensor integration
● Working with sensors such as IMU, GPS, cameras, LIDARs and implementing path planning and mission control
Independent Consulting
6月 2020 - 11月 2020 (5 , 1 )
As a consultant to educational platform(s), such as Udacity, I utilize my specialized knowledge in the fields of Deep Learning, AI and my strong communication skills to provide some mentor services like: project reviews and other student support services.
Tensorflow In Practice Speclialization
9月 2019 - 10月 2019 (1 , 1 )
Aims to establish good understanding of the tools software developers use to build scalable AI-powered algorithms in TensorFlow.
教育
Robotics Software Engineer From Udacity
(1 )
Electronics and Communication Engineering
(5 )
仕事についてAhmed O.に連絡する
ログインしてチャットで詳細を相談しましょう、
認証
トップスキル
同じようなショーケースを検索
招待状の送信に成功しました!
ありがとうございます!無料クレジットを受け取るリンクをメールしました。
メールを送信中に問題が発生しました。もう一度お試しください。
クリップボードへのコピーが失敗しました、権限を調整してからもう一度お試しください。
クリップボードにコピーされました。
プレビューを読み込み中
位置情報へのアクセスが許可されました。
あなたのログインセッションの有効期限がきれ、ログアウトされました。もう一度ログインしてください。